

联系我们
产品介绍
MSI326微惯性测量组合采用MEMS技术工艺,利用梳齿可变电容式微机械结构,具有体积小、灵敏度高、低噪声、高稳定性等优点。用于测量运动物体的加速度信息及角速度变化等姿态信息。特点:全温区温补,UART同步输出,刷新率可调,最高1000HZ。
性能指标
测试条件:常温(23±2℃)
| 陀螺 | 加速度计 | 系统 | ||||||
| 量程 | ±450 | °/s | 量程 | ±16 | g | 刷新率 | 1000 | Hz |
| 全程零偏(-40~+85℃) | 0.05 | °/s | 全程零偏(-40~+85℃) | 2.5 | mg | |||
| 角度随机游走 | 0.15 | °/√h | 速度随机游走 | 0.04 | (m/s)/√h | 供电电压 | 3.3±0.1 | V |
| 零偏不稳定性 | 2 | °/h | 零偏不稳定性 | 40 | μg | |||
| 零偏重复性 | 10 | °/h | 零偏重复性 | 0.2 | mg | 电流 | 20 | mA |
| 标度误差 | 2 | % | 标度误差 | 2 | % | 工作温度范围 | -45~+85 | ℃ |
| 标度因数非线性 | 0.008 | %FS | 标度因数非线性 | 0.02 | %FS | |||
| 带宽 | 150 | Hz | 带宽 | 150 | Hz | 存储温度范围 | -45~+85 | ℃ |
| 三轴正交耦合误差 | 0.05 | ° | 三轴正交耦合误差 | 0.05 | ° | 重量 | 15 | g |
应用领域

● 惯性导航:组合导航、平台稳定
● 姿态控制:无人机、人型机器人
● 汽车领域:无人驾驶、电子稳定程序、飞行汽车
● 风电、eVTOL
外形尺寸及接线定义
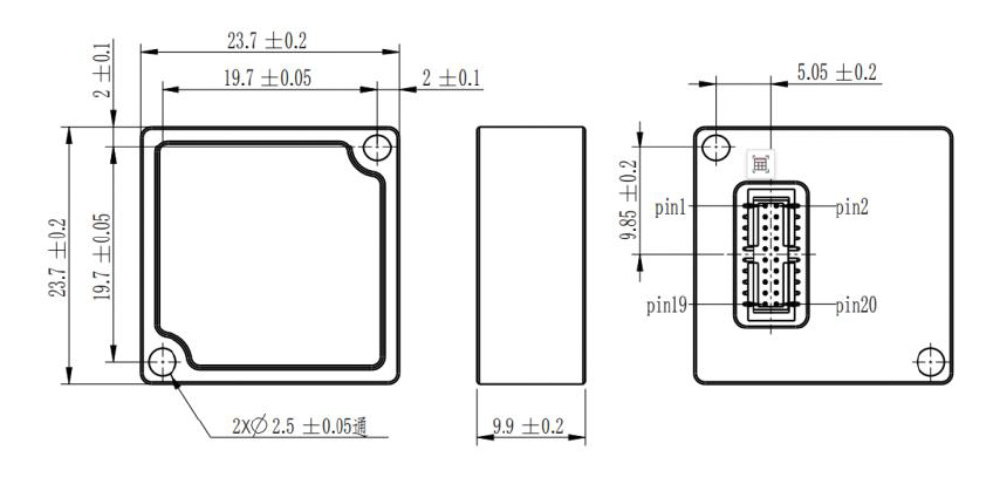
| 输出接口接线定义 | ||
| 序号 | 定义 | 说明 |
| 7 | TXD | UART输出 |
| 9 | RXD | UART输入 |
| 10、11、12 | VCC | 电源3.3V |
| 3、4、8、15 | GND | 电源地 |
| 1、2、5、6、13、14 16、17、18、19、20 | NC | N/A |
咨询
有关产品或销售的咨询,请与我们联系
