

联系我们
产品介绍
MNV420A 是一款结构紧凑,GNSS/INS 一体化、高性价比的组合导航系统,内部集成了高精度 GNSS 模块、战术级 IMU,外接车辆 CAN 轮速信息,能够应对复杂的城市道路遮挡、高速公路信号干扰 等环境,为智能汽车应用提供连续、稳定、可靠的位置、速度、姿态和时间。
性能指标
测试条件:常温(23±2℃)
| 陀螺 | 加速度计 | 系统 | ||||||
| 量程 | ±450 | °/s | 量程 | ±10 | g | 横滚/俯仰 | ≤0.05 | ° |
| 零偏稳定性 | ≤10 | °/h | 零偏稳定性 | ≤0.2 | mg | 航向 | ≤0.1 | ° |
| 标度因数非线性 | ≤50 | ppm | 标度因数非线性 | ≤200 | ppm | 位置 | ≤1.5m(单点) | -- |
| 角度随机游走 | ≤0.25 | °√h | 速率随机游走 | ≤0.02 | m/s/√h | ≤2cm+1ppm(RTK) | ||
| GNSS接收机 | 速度精度 | ≤0.03 | m/s | |||||
| 频点 | BDS B1/B2;GPS L1/L2; | -- | GNSS失锁位置漂移@10s | ≤0.3 | m | |||
| GLONALL L1/L2; | GNSS失锁位置漂移@1km/2min | ≤0.2(里程计辅助) | % | |||||
| Galileo E1/E5b | GNSS失锁航向漂移@1min | ≤0.15 | ° | |||||
| 位置精度(1σ) | ≤1.5m(单点) | 系统特性 | ||||||
| ≤2cm+1ppm(RTK) | 供电电压 | 9~24 | v | |||||
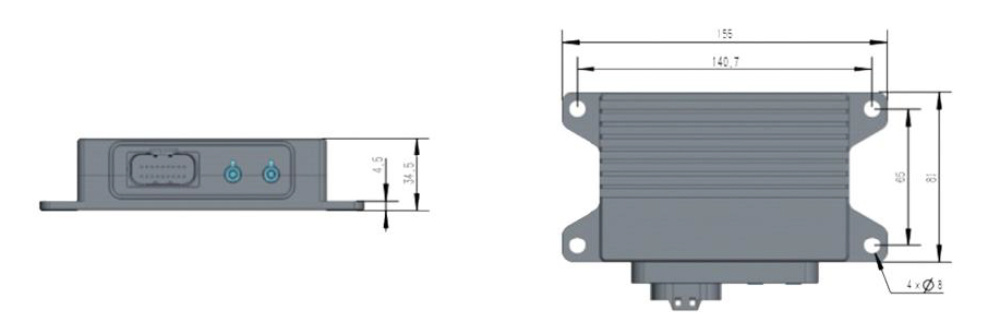
| 速度精度(1σ) | ≤0.03 | m/s | 尺寸 | 155*81*34.5 | mm | |||
| 重量 | ≤415 | g | ||||||
| 航向精度(1σ) | ≤0.2/基线1m | ° | 接口类型 | RS422/CAN | -- | |||
| 数据更新率 | 100/200 | Hz | ||||||
| 航向精度(1σ)(INS GNSS组合数据) | ≤0.08/基线2m | ° | 波特率 | RS422, 230400 | bps | |||
| CAN, 500K | ||||||||
应用领域

● 汽车无人驾驶 无人驾驶直升机和固定翼 自动导航车
● 平台稳定和校准 精准农业 动中通
● 船舶及海底机器人 惯性测量系统
外形尺寸及接线定义
| PIN角 | 信号名称 | PIN角 | 信号名称 |
| 1 | CAN2_L | 10 | 1PPS |
| 2 | CAN2_H | 11 | -- |
| 3 | CAN1_L | 12 | GND |
| 4 | CAN1_H | 13 | -- |
| 5 | GNSS_DIFF_TXD | 14 | RS422 R+ |
| 6 | GNSS_DIFF_RXD | 15 | -- |
| 7 | GND | 16 | RS422 R- |
| 8 | 电源地 | 17 | RS422 T+ |
| 9 | 电源正 | 18 | RS422 T- |
咨询
有关产品或销售的咨询,请与我们联系
